不要轻易碰我,不然我就知道你有多软了|Science Robotics
软栗子 发自 凹非寺 量子位 报道 | 公众号 QbitAI
一直以来,总有人在帮机器人加触觉。
那样,机器人感受到的世界,就不只是各种形状的组合,也有丰富的质感了。
斯坦福大学的研究人员,也用自己的方式,努力给机器人更加精致的触觉。
他们走的路,是模仿人类触觉原理的仿生皮肤。这条路已经走了很久。
最近的研究成果,是一双布满传感器的新手套:无论灵敏度还是实时性,都以前更加像人类皮肤了。
于是,这项研究登上了最新一期的Science Robotics。
那么,人类皮肤的触感是怎样形成的?又要怎样用电子元件来模拟?很快你就知道了。
荆棘丛生的人皮
人类的手指和手掌上,原本就有很多传感器。
这些传感器是和名叫“棘毛” (Spinosum) 的子层密切配合,这一层里,有微观的千山万壑。
崎岖的地形,对触觉的形成非常重要。
因为手指接触物体的时候,外层皮肤会向棘毛这一层移动。
如果是轻度接触,外层皮肤会接触到那些“小山”,山上的传感器就会感受到。
如果是重度接触,外层皮肤被迫走向更深一层,凹陷的沟壑里传感器会接收到信号。
人类皮肤对压力轻重的感觉,就是这样形成的。
不过,测量压力的大小,也不是棘毛功能的全部。
△ 压力的方向也很重要
棘毛还可以测量压力的方向,就是切向和法向分别有多少力施加在皮肤上。
如果一根手指向北推某个东西,“小山”的南坡就会感受到强烈的信号。
这是一种叫做剪应力 (Shear Force) 的力量,可以帮助人类握起一个鸡蛋:
让鸡蛋不会被握碎,也不会掉在地上摔碎。
三层传感器模拟人皮
所以,怎么用电子元件来模拟这种原理?
手套上,每个手指的传感器都是三层的。其中,上层和底层是带电的。
研究人员在 (上层与底层) 两个相对的面上,铺设了电线网格 (Grid of Electrical Lines) ,就像电场线那样。然后让这些“电场线”互相垂直,形成一个密集的感应像素阵列。
底层,就像人类皮肤的棘毛层那样沟壑纵横。
中间是绝缘的橡胶层,让上层和底层的电极保持分离的状态。
这一层很重要,因为两层电极距离很近,又不互相接触,这样的结构可以储存电能。
当手指向下按的时候,上层电极和下层就会更靠近,存储的电能就会增加。
而底层的山坡和深谷,可以给电线网格上的每一点,找到它对应的压力大小和方向。
这样一来,电子皮肤的触感就形成了。
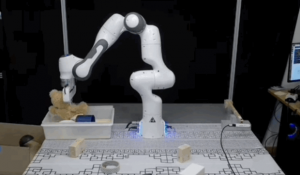
轻轻碰一碰树莓,也不会伤害到幼小的果实。
当然,抓起乒乓球来各处移动一下也不是问题 (开头的图,再出现一次) 。
实验室的小姐姐
常年致力于研制电子皮肤的斯坦福实验室,老板是鲍哲南教授。
小姐姐笑容有些羞怯,但她是美国国家工程院院士,也在2017年获得过联合国教科文组织授予的世界杰出女科学家称号。
论文传送门:
http://robotics.sciencemag.org/content/robotics/3/24/eaau6914.full.pdf
- SQuAD风云:AI对鲁迅作品的理解超过我了?别激动……2018-01-20
- 马云正式卸任后,阿里巴巴开盘跌0.87%2019-09-10
- 亚马逊在华拓展云计算团队,挑战阿里巴巴和腾讯2019-10-16
- AI独角兽云知声,已完成一期科创板IPO辅导2019-10-17
相关阅读