
全凭“脚感”,这个不看路的机器人就能稳稳爬楼梯,一脚踩空也不怕 | RSS 2021
来自俄勒冈州立大学
鱼羊 发自 凹非寺
量子位 报道 | 公众号 QbitAI
能自己走台阶:
△安全绳仅用于防止意外
一不小心踩空了也能及时调整步伐。

上下斜坡更是闲庭信步。

你敢信,这只名叫Cassie的双足机器人,其实是个“盲人”——不带视觉传感器,完全靠触觉感知世界的那种。
这是一项来自俄勒冈州立大学的最新研究。研究人员表示:
据我们所知,这是世界上第一个仅靠身体感知,就能稳稳爬楼梯、或穿越类似高低起伏地形的双足机器人。
是的,不仅仅是上下各种高低台阶。

像这样断在路上的树干,Cassie也能凭借感觉稳稳跨越。

两只脚处在不同高度的平面上,也不影响平衡。

不过,别看这家伙现在一副游刃有余的样子,在没有经历特训之前,它其实是酱婶的:

emmm……
所以,俄勒冈州立大学的盆友们,到底让机器人进行了怎样的训练?
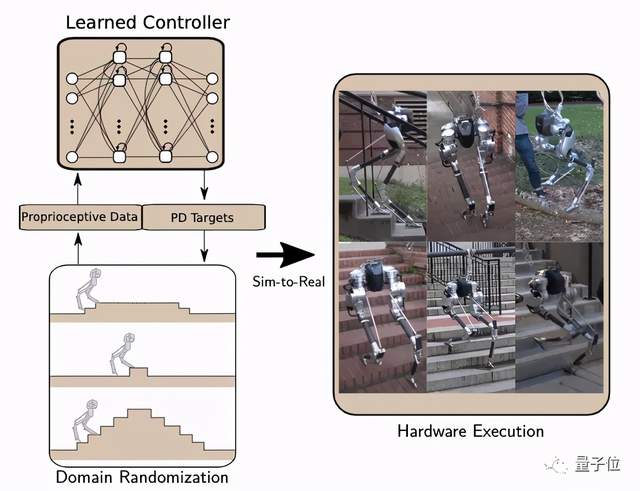
核心方法,依然是基于LSTM网络的强化学习。
不同之处在于,俄勒冈州立大学的研究人员,在训练时加入了随机化地形的影响。
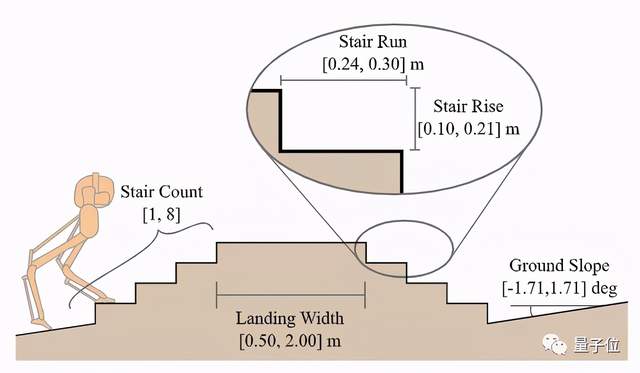
也就是说,当机器人在模拟环境中训练时,会遇到向上或向下的类似楼梯的变化地形,变化因素包括:楼梯的级数,每一级楼梯的高度、长度、宽度,以及楼梯前后地面的坡度等。
具体而言,楼梯的高度在10cm到21cm之间,宽度在24cm到30cm之间。
并且,模拟环境中的多级台阶并不是均匀的,即每一级台阶都会被添加进±1cm的误差。
除此之外,为了有效地让Cassie把在模拟环境中学习到的爬楼梯策略应用到现实当中,防止过拟合,研究人员还在训练阶段给它制造了各种各样的麻烦。
比如在每次训练开始之前,把机器人的关节阻尼、质量、偏移量,地面的摩擦力等动力学参数一通随机,让控制器尽量去面对各种完全不同的环境。

值得一提的是,在测试中,研究人员们观察到,机器人学会了一种“反直觉”的策略:运动速度更快时,爬楼梯的表现反而更好。
论文的第一作者Jonah Siekmann介绍:
由于机器人是盲人,看不见周围的环境,所以它落脚的位置可能会很糟糕。
比如它一脚踩在楼梯沿上,产生的力量就会把机器人推下楼梯。
在低速情况下,机器人自身的动量不足,难以克服这种向后的推力;但在高速情况下,机器人会倾向于跳过一些台阶,这反而能使其重新找到平衡。
看到这里,你觉得Cassie表现如何?
目前,这项研究已经中了机器人顶会RSS 2021。
论文地址:
https://arxiv.org/abs/2105.08328
参考链接:
[1]https://spectrum.ieee.org/automaton/robotics/humanoids/agility-robotics-cassie-stairs
[2]https://www.youtube.com/watch?v=MPhEmC6b6XU&t=154s
[3]https://www.youtube.com/watch?v=nuhHiKEtaZQ
— 完 —
- 3万小时触觉数据补齐具身智能“手感”!新智具身&复旦报告三连发2026-07-26
- WAIC信息爆炸!大佬们都在说什么,笔记看这里2026-07-18
- 不是吧OpenAI首款硬件吹半天就是个AI音箱??2026-07-15
- 菲尔兹奖提前泄露!王虹邓煜双双在列2026-07-14
相关阅读






