那个爆火的“梦中修炼”AI,你也能用Keras搭一个了
原作:David Foster
林鳞 栗子 编译自 Medium
量子位 出品 | 公众号 QbitAI
上月,量子位报道了Google Brain的David Ha和“LSTM之父”Jürgen Schmidhuber的论文World Models。论文中习得周星驰睡梦罗汉拳的AI可在梦里“修炼”,好生厉害~
这篇文章就教你如何用Python和Keras搭建一个属于自己的“梦境修炼AI”。
开始教程前,先放上原研究的论文地址:
https://arxiv.org/abs/1803.10122
第一步:理解环境
我们要搭建一个能在2D车道环境中开车的强化学习模型,那么这个环境从哪来呢?我推荐OpenAI GYM,可进入下方地址获取。
环境获取地址:
https://gym.openai.com/
在这个任务的每个时间步中,我们需要用64×64像素的车辆和环境的彩图喂算法,并且需要返回下一组操作,尤其当方向(-1到1),加速度(0到1)和制动(0到1)变化时。
这个动作将随后被传递到环境中,之后再返回下一组操作,如此循环。
得分会随着智能体跑过轨道而积累,随着时间步消耗,每个时间步得-0.1分。例如,如果一个智能体用732帧跑完了轨道,那么最后的得分就是1000-0.1×732=926.8分。
下面这张图展示的是一个智能体在前200个时间步中执行的[0,1,0]的动作,但之后画风一转突然变成了随机乱跑……不过这显然不是个好策略。
OK第一步已经完成,我们接下来的任务是,训练智能体理解它周围环境的信息,确定下一步的最佳行动。
第二步:解决方案
开始第二步前先给大家推荐我们今天这篇论文的在线交互版~
交互版地址:
https://worldmodels.github.io/
接下来我将顺着上面的这个方案,重点其中的几部分是怎样组合起来的。这样吧,我们将虚拟环境与真实开车情况做对比,直观理解一下这个解决方案。
这个方案由三部分组成,每一部分都需要单独训练:
一种变分自编码器(VAE)
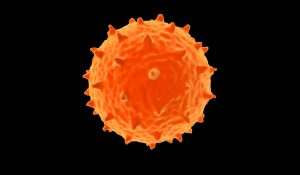
想象一下,当你在开车的同时考虑别的事情时,你不会分析视野中的每个“像素”。你的大脑会自动将视觉信息压缩成更少的“本征”实体,如道路的弯曲程度、即将到来的转弯和相对于道路的位置,指挥下一步动作。
这就是VAE要做的——将64×64×3(RGB)的输入图像遵循高斯分布压缩成一个32维的本征矢量latent vector(z)。
这一步非常重要,现在对智能体周围环境的表示变得更小了,因此学习过程将变得更加高效。
带混合密度网络输出层的循环神经网络(MDN-RNN)
如果你的决策中没有MDN-RNN组件,那么开车时可能是这样的情景。
当你在开车时,每个场景都不会完全出乎你的意料。在我们这个程序里,这种前瞻性的思考由RNN完成,在我们这个例子中,LSTM中总共有256个隐藏单元,这个隐藏状态的向量由h表示。
和VAE相似,RNN也试图对汽车当前在环境中的状态建立一个“本征”理解,但这一次带着一个目标:基于之前的“z”和之前的动作,预测下一个“z”可能是什么样子。
MDN输出层仅允许出现下一个“z”从任何一个高斯分布中提取的情况。
在这篇World Models的研究中,下一个观察到的潜在状态可能从任何一种高斯分布中得到。
控制器
到目前为止,我们还没讲到关于选择操作的事~这部分主要是控制器完成的。
控制器是一个紧密连接的神经网络,输入z的联结(长度为32的VAE当前潜在状态)和h(长度为256的RNN隐藏态)。
这3个输出神经元对应于三个动作,并按比例缩小到合适的范围。
模拟“三方会谈”
如果说你还是不太明白这三部分职责之间的联系,那我模拟一下行车过程中它们三方的对话,帮你形象理解一下。
VAE:前面看起来是条直路,向左有个轻微的拐弯,汽车正朝着道路的方向行驶(z)。
RNN:根据你的描述(z),以及控制器选择上个时间步猛加速的行为,我将更新我的隐藏状态(h),这样下个观察到的视野就会被预测为一条直线,但在视野中稍微偏左一点。
控制器:基于VAE (z)的描述和RNN (h)的当前隐藏状态,我的神经网络输出下一个动作为[0.34,0.8,0]。
这个动作将被传递给环境,然后返回更新后的视野,如此反复循环。
看明白了吧?就是这三部分控制了车辆的移动。那么接下来,是时候研究如何设置环境,帮训练自己的智能体。
第三步:设置环境
如果你的笔记本性能比较高,可以在本地运行解决方案。对于电脑条件一般的程序猿们,我还是建议你用Google Cloud Compute,快还方便。
https://cloud.google.com/compute/
下面这些步骤我已经在Linux (Ubuntu 16.04)上测试过了——如果你要在Mac或Windows系统里装,更改安装包的相关指令即可。
跟我一步一步来——
1. 克隆存储库
储存库地址:
https://github.com/AppliedDataSciencePartners/WorldModels
在命令行中,找到想要克隆存储库的地方,输入以下内容:
这个库是由World Model的一作David Ha开发的实用estool库改编的,他用Keras和TensorFlow后端实现了神经网络的训练。
2.设置虚拟环境
我们需要创建一个Python 3虚拟环境(我用的是virutalenv和virtualenvwrapper)
3.安装包
4.安装requirements.txt
第四步:生成随机rollout
对于赛车环境来说,VAE和RNN可以用于随机的rollout数据上——也就是说,在每一个时间步中随机采取行动产生的观测数据。实际上,我们使用的是伪随机动作,最开始会强迫汽车加速,让它脱离起跑线。
由于VAE和RNN独立于决策控制器,所以需要保证我们提供各种各样的观察结果,和各种各样的动作,将它们存为训练数据。
要生成随机的rollout,可以从命令行运行以下指令:
或者在一台没有显示器的服务器上运行以下指令:
这将产生2000次的输出,每个rollout最长为300个时间步。
两组文件在./data中保存,一是obs_data_*.npy(将64×64×3图像存储为numpy数组),二是action_data_*.npy(存储三维动作)
第五步:训练VAE
上面我们介绍了VAE是操纵小车在环境中移动的一把手,现在我们就讲讲如何训练它。这一步可能比你想象的要简单的多,因为所需文件只要obs_data_*.npy文档就好了。不过温馨提示一下,确保你已经完成了第四步,因为要之后将这些文档放于./data文件夹中。
从命令行运行:
我们将从0到9的每批数据上训练一个新VAE。
模型的权重将被存储在./vae/weights.h5中,–new_model是在提示脚本从头开始训练模型。
如果文件夹中有weights.h5,并且没有指定–new_model标记时,脚本将从该文件加载权重,并继续训练现有模型。这样,你就可以批量迭代VAE。
VAE架构规范在./vae/arch.py文件夹中。
第六步:生成RNN数据
现在我们有了训练好的VAE,就可以用它生成为RNN训练集。
RNN需要将VAE中编码的图像数据(z)和动作(a)作为输入,并将VAE中预先编码的图像数据作为输出。你可以通过运行下面的指令生成这些数据:
这将改变obs_data_* .npy和action_data_*.npy文件中从batch 0到batch 9的数据,并且将它们转化成RNN需要的正确格式完成训练。
两组文件将保存在./data中,rnn_input_* .npy存储[z a]连接的向量,rnn_output_*.npy存储的是前一个时间步的z向量。
第七步:训练RNN
上一步生成了RNN的数据后,训练它只需rnn_input_*.npy和rnn_output_*.npy文件就可以了。在这里再次提醒:第六步一定要完成,这些文件都要在./data文件夹里才可以。
在命令行运行下列代码:
这将在0到9的每批数据上训练一个新的VAE。模型权重将被保存到./rnn/weights.h5
中。new_model标志提示脚本从头开始训练模型。
和VAE一样,如果文件夹中存在weights.h5并且没有指定–new_model标记,那么脚本将从该文件加载权重,并继续训练现有模型。通过这种方式,您可以迭代地批量训练RNN。
找不到RNN架构说明的可以去翻翻./rnn/arch.py文件,可能会让你小小开心一下。
第八步:训练控制器
这是一个愉快的章节。
上面,我们已经用深度学习搭建了一个VAE,它可以把高维图像压缩成一个低维潜在空间;还搭好了一个RNN,可以预测潜在空间随着时间推移会发生怎样的变化。能走到这一步,是因为我们给VAE和RNN各自装备了一个由随机rollout data组成的训练数据集。
现在,我们要使用一种强化学习方法,依靠名为CMA-ES的进化算法来训练控制器。
输入向量有288维,输出向量是3维。于是,我们一共有288 x 3 + 1 (bias) = 867个参数需要训练。
首先,CMA-ES要为这867个参数,创建多个随机初始化副本,形成种群 (population) 。而后,这个算法会在环境中,测试种群中的每一个成员,记录平均分。像达尔文的自然选择一样,分数比较高的那些权重就会获得“繁衍”后代的资格。
敲下这个代码,给每个参数选择一个合适的值,就可以开始训练了:
如果没有显示器的话,就用这个代码:
其中,
–num_worker 16:这个数字设置不要超过核数。
–num_work_trial 2:这里是每个worker要测试的,种群中的成员数量。
–num_episode 4:这里是种群里每个成员需要接受打分的集数。
–max_length 1000:这里是一集里最大的时间步数。
–eval_steps 25:这里是在长达100集的最佳权重评估过程中,经历了多少代进化。
–init_opt ./controller/car_racing.cma.4.32.es.pk在默认情况下,控制器每一次都会从头开始运行,把当前状态保存到controller目录下的pickle文件中。然后,下次我们就可以从存档的地方继续训练。
在每一代繁衍完成之后,算法的当前状态和最佳权重集合都会输出到./controller文件夹。
第九步:可视化
到这里,我们的智能体走过了200代,练到了883.13的平均分。它轮回的天地是:Google Cloud,Ubuntu 16.04 vCPU, 67.5 RAM,步骤和参数都和这篇文章里写的一样。
论文的作者大大们训练出906的平均分,那是2000代修仙的结果,也是目前这个环境下的最高分了。他们需要的配置也高一些,训练数据有10,000集,种群大小是64,计算机是64核等等。
将控制器的当前状态可视化,要敲上面这个代码。其中:
–filename:这是你想要赋予控制器的那些优秀权重的json路径。
–render_mode:在屏幕上渲染环境。
–record_video:把mp4输出到./video文件夹:
–final_mode:开始100集的控制器测试,输出平均分。下面是个可爱的小Demo。
第十步:太虚幻境
前面已经有很多颗赛艇了,不过论文的下一小节着实让我吃了一鲸。我感觉,这个方法还是很有现实意义的。
论文中介绍了在名为DoomTakeCover的另一个环境里,获得的美妙训练结果。这里的目标是让智能体学会躲避火球,活得越长越好。
这一章里,我们可以看到,智能体是如何在VAE和RNN联合打造的幻境里 (而非所处的环境里) ,一步步解锁游戏技能的。
唯一不同的是,这里的RNN还要学会预测,自己在下一个时间步里扑街的概率。如此一来,VAE与RNN的组合可以生成一个自己需要的环境,再用它来训练控制器。这便是浩瀚无边的“World Model”了。
亦真亦梦的总结
我们可以把幻境学习的过程总结一下——
智能体的原始训练数据只是和真实环境的随机互动而已。有了这些,它就能对世界运行规律产生一个潜在的理解——自然分组、物理原理,以及自己的行为会对世界的状态产生怎样的影响。
然后,依靠这份理解,智能体便会为某个特定的任务,建立一套最佳的执行策略。这里,它甚至不需要接受真实环境的考验,只要在自己幻想出来的环境模型里玩耍,就当测试了。
那里绿草如茵
就像小朋友初学走路,那是多么生意盎然的场景啊。
- SQuAD风云:AI对鲁迅作品的理解超过我了?别激动……2018-01-20
- 马云正式卸任后,阿里巴巴开盘跌0.87%2019-09-10
- 亚马逊在华拓展云计算团队,挑战阿里巴巴和腾讯2019-10-16
- AI独角兽云知声,已完成一期科创板IPO辅导2019-10-17
相关阅读