
华为天才少年造出自动驾驶单车!图纸已开源,硬件成本一万,B站老板:重新定义「自行」车
躲避障碍、自动寻路不在话下
鱼羊 金磊 发自 凹非寺
量子位 报道 | 公众号 QbitAI
果然高手在民间。
谁能料到,一辆自行车的硬核打开方式,竟是大火的自动驾驶。
踢开脚撑,金鸡独立、稳如泰山:

单侧加个板砖?小场面:
毕竟,它是连高难度“杂技姿势”都能hold住的自行车:

没事走两步?
可以有,还是会自己拐弯的那种:

避障、上路,毫无压力:

甚至还配备了特斯拉都没有的激光雷达。
这就是B站“野生钢铁侠”稚晖君耗时4个月时间(基本只是周末),打造出的全新项目XUAN (轩)。

短短几天,播放量超过150W,硬核、复杂程度之高,直接看呆一众网友。
来感受一下这个画风。

连B站老板陈睿都被吸引而来:

甚至业内人士也直呼:
任何一个部分拿出来都是一篇本科毕业论文。
还有实物,硕士毕业绰绰有余……

稚晖君到底是如何打造的这么一台“赛博朋克”自行车?
接下来,让我们一起一探究竟(经授权)。
(你可能还很关心它的价格,别着急,我们文末揭晓答案~)
把自行车做成自动驾驶,共分几步?
稚晖君选择的自行车,是大家非常熟知的死飞 (Fixed Gear)。
(没错,就是漂移玩家的最爱)
这种自行车的一大特点,便是结构简单、没有刹车。
于是,稚晖君先对死飞进行了一个CAD建模的工作。
建模工作完成之后,便得到了一辆虚拟自行车。
此后的所有改造工作,便可以在计算机上完成。
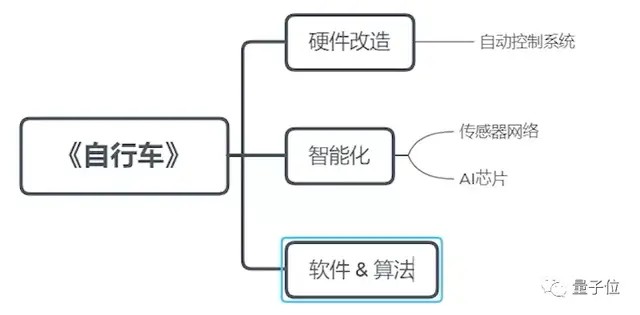
整体来看,XUAN的诞生一共分为三大步:
- 硬件改造:因为自行车是一个欠驱动系统,所以先要做的就是让它站稳,然后跑起来。这一步将涉及一套复杂的自动控制系统。
- 智能化:毕竟自动驾驶嘛,“工具人”就得被抹去。因此,这一步便是搭载一整套传感器组成的感知网络,以及一个算力足够强大的计算芯片作大脑。
- 软件和算法:最后一步,便是在上述的硬件基础上,开发、实现一套感知和控制算法。稚晖君称之为“注入灵魂”。
Step by Step,先来看下第一个大问题。
自行车怎么自己保持平衡?
在骑自行车的时候,前后方向的平衡,靠得是2个轮子的支撑和地面摩擦力。
而左右方向上,运动过程中靠的是龙头的左右调节,获取转向的加速度,以此抵消重力的影响。像这样:

那么在静止状态下呢?
稚晖君给出的思路便是——角动量守恒。
简单来说,当车子在重力作用下发生倾倒,就用动量轮来产生一个相反力矩,抵消掉重力力矩。
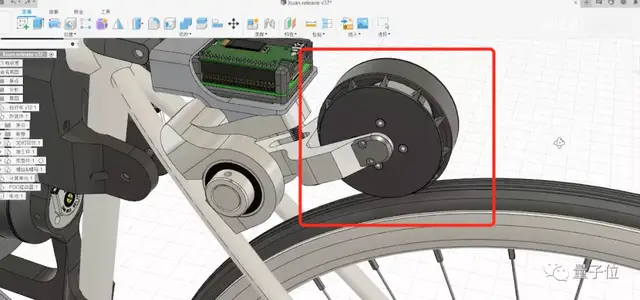
具体而言,稚晖君在这辆死飞座位下方安装了一个无刷电机,目的是驱动一个金属的动量轮。

而在座位后方,他也安装了一个无刷电机,这个目的则是靠摩擦力来驱动后轮,让自行车整体前后运动。
稚晖君本是想用3D打印来完成这两个零件的加工,但碍于材料硬度和刚性不足,所以金属材料成为了此次的首选。
(所幸,稚晖君朋友家里“有厂”,问题迎刃而解)
而后,便是快乐的组装环节:
OK,自行车的平衡问题,就此解决。
自行车的“机器大脑”
硬件框架有了,想让自行车能跑起来,甚至能认路,下一步就是上“脑子”。
跟人类相似,机器人也分“大脑”和“小脑”。
简单来说,小脑用来控制实时行动;大脑则负责耗费算力、高时延的感知和决策。
这一回,稚晖君给自行车上的“小脑”是ESP32。
ESP32是一种低成本、低功耗的单片机控制器,集成Wi-Fi和双模蓝牙。

基于FreeRTOS(一个开源嵌入式实时操作系统),稚晖君搭建了小脑的RPC通信框架,用来实现传感器的数据处理,以及电机的控制算法。
“大脑”则是昇腾310。这是昇腾系列的边缘计算芯片,基于达芬奇架构,最高能够提供22TOPs的算力。

大脑的算法开发,主要基于昇腾AI栈和ROS(机器人操作系统)实现。
于是,在深度相机、激光雷达等传感器的帮助之下,这辆自行车能够检测出周围的物体,实现避障和跟随:
还能够机智地识别地形,给自己规划路径:

自行车的“机器心脏”
当然啦,“成精”的自行车,不仅要有头脑,还要有一颗强劲的“心脏”来驱动它工作。
而XUAN的“心脏”来自稚晖君的另一个项目,Ctrl-FOC矢量控制驱动器。
这是一个超迷你双通道无刷电机驱动器,单路最大驱动电流能超过100A。
值得一提的是,稚晖君的这一FOC驱动器有两个版本的设计方案,其中一个版本,电路设计为上下叠板设计,将逻辑单元和功率单元分开。也就是说,只需要替换掉驱动电路,就可以匹配更大功率的电机。
具体到XUAN这个项目,下图中这么大点的驱动器,最终实现了两路共100A的无刷电机FOC控制,还驱动了车头60kg扭力舵机和散热风扇。

最后,注入灵魂
万事俱备,但想要上路,至此还少了一点炼丹的灵魂——调参。
稚晖君表示,这辆自动驾驶自行车的控制代码中,有超过50个重要参数,包括控制周期、反馈矩阵、PID增益、滤波器截止频率等等。
此外,电机的功率、重心的分布等物理参数,也都会对最终的效果造成影响。
稍有不慎,那自行车就不是稳如老狗那画风了……

在数学建模之后,稚晖君还采用了游戏引擎Unity作为仿真环境,像正经自动驾驶研发那样,先在仿真环境里让自行车跑了个踏实。
总之,让一辆自行车成熟起来,自己上路,够不容易的。
就有网友表示:
人傻了,毕业设计题目是自行车自平衡系统设计,做到调参就不会了。
不过,受限于整车功率,目前这辆自行车还不能载人。
另外,也有网友提出,用动量轮来控制平衡属于某种意义上的作弊。对此,稚晖君回应:现在的龙头传动结构设计不太合理,之后会尝试只用龙头控制平衡。

为什么要造XUAN?
有关“栈溢出工程师”、“野生钢铁侠”稚晖君,想来关注B站科技区的小伙伴们已经很熟悉了。
稚晖君本名彭志辉,2018年毕业于电子科技大学,2020年通过“天才少年计划”加入华为。
他的视频向来以硬核著称,比如从手画PCB到写C++代码全部一人搞定的套娃小电视。
辣么这次,稚晖君又是怎么萌发了打造一辆自动驾驶自行车的念头的呢?
理由有些“暴力”……
骑车不小心摔了,脸刹着地……

稚晖君表示,“这事不能就这么过去了”,于是乎:
(心疼稚晖君几秒)
当然,稚晖君本人也在视频中表示,其实很早就有设计这种自行车的想法。
最初是因为看到清华大学的那项自行车研究,可以跟随人类,敏捷避开障碍物。
其背后的类脑芯片“天机”,也于2019年8月登上Nature封面。
好奇的小伙伴肯定会问了,二者有何区别?
量子位替你们问完了哈~
首先,是原理不太一样。
清华的自行车模仿的是人类行为,没有使用动量控制,而稚晖君的“轩”则涉及到了动量控制。
此外,在龙头方面,稚晖君表示在改进过后,也可以实现清华的控制方式(移动过程使用龙头平衡,静止状态使用动量平衡)。
但最核心的一个区别就是,清华打造的自行车背后,核心是类脑芯片。
对此,稚晖君表示:
他们的工作很厉害,我这个无法类比,只是受他们启发做了个类似的应用。
为了体现跟清华工作的区别,稚晖君本人还在项目名字上下点了功夫。
XUAN里的“U”,代表的意思是unNATURAL,“正经翻译”就是——没上过Nature……

这个项目一如既往地开源了,如果你也想复刻一下……
哦对了,是时候该揭晓XUAN的造价了——据大神本人不完全统计,超3万元。
不过,稚晖君也表示:
最终硬件成本来算的话应该不到一万,就激光雷达贵一点,主要还是试错成本。
以及,划重点,不售卖哈~

哔哩哔哩
自动驾驶自行车
小程序
视频连接:
https://www.bilibili.com/video/BV1fV411x72a
项目连接:
https://github.com/peng-zhihui/XUAN-Bike/tree/main/Hardware/XUAN%E5%8A%A0%E5%B7%A5%E4%BB%B6
参考链接:
[1]https://zhuanlan.zhihu.com/p/147659820
[2]https://www.bilibili.com/video/BV11V41127pq
— 完 —
- SpaceX一上市,连食堂阿姨都要成百万富翁了。。。2026-06-12
- 马斯克SpaceX路演PPT:60页,值1.77万亿美元2026-06-08
- 刚刚,李飞飞亲自下场定义世界模型2026-06-04
- DeepSeek V4还能更省!新工具缓存命中率高达99.82%,2折稳定到手2026-05-25
相关阅读











