
嬴彻


这家自动驾驶公司融资2.7亿美元,京东美团齐出手
2021-08-04
定位与建图算法入选机器人顶会,嬴彻科技亮相ICRA 2021
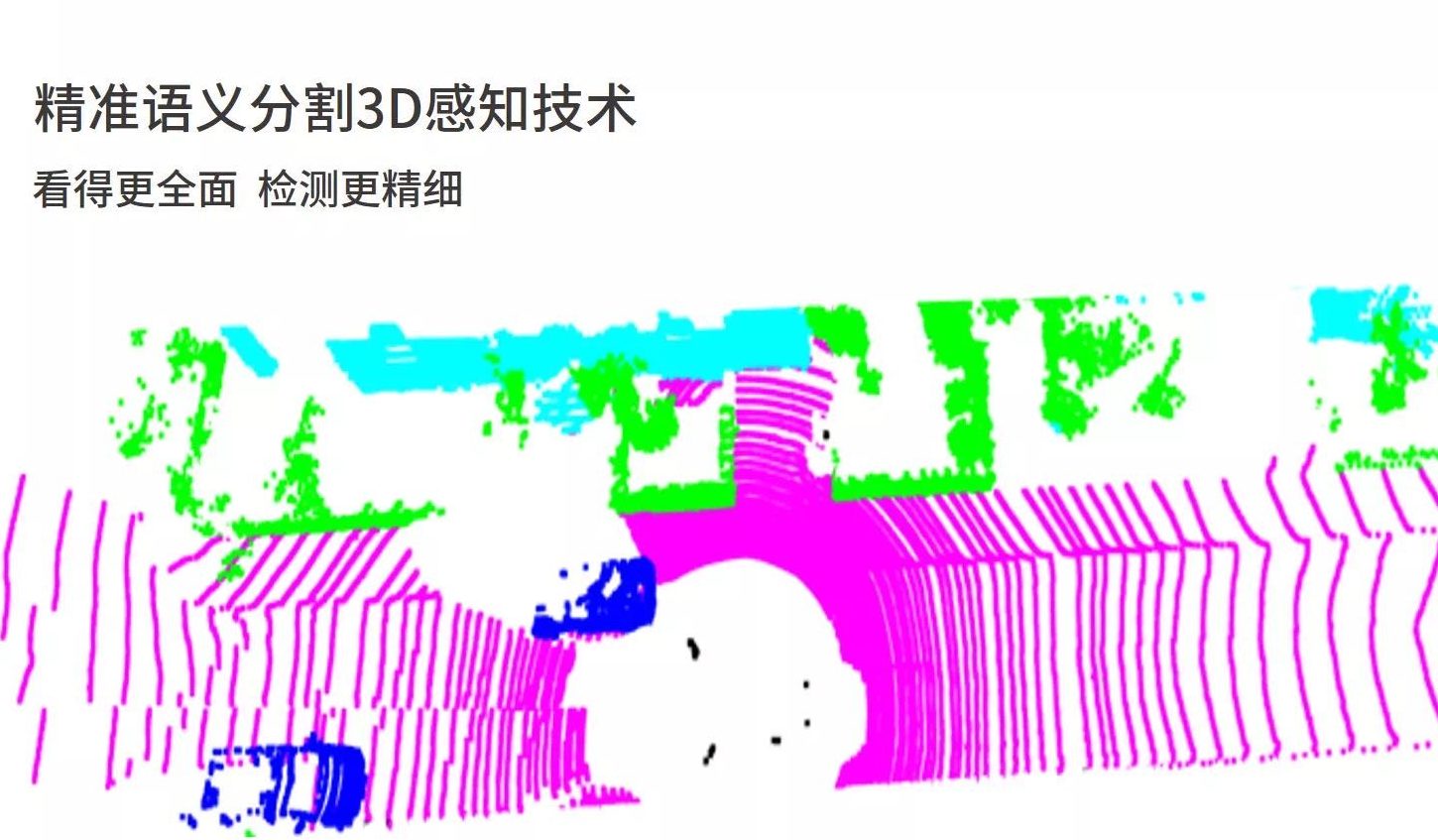
该论文提出了一种轻量化、紧耦合的深度网络和视觉惯性里程计系统(VIO),通过应用一种全新的压缩深度映射表示,用稀疏特征取代了过去依赖密集残差的方法,从而以更少的资源消耗和更高的效率获得了精确的姿态估计和稠密的周边环境地图。
2021-06-15

嬴彻科技获国内首个重卡自动驾驶最高级别ASIL D功能安全流程认证
这标志着嬴彻科技已按照ISO26262功能安全流程认证的最高等级ASIL D级别要求,建立国际先进的相应重卡自动驾驶研发流程体系,达到车规级安全标准,向2021年底L3自动驾驶卡车量产目标更进一步。
2021-06-10



嬴彻科技完成1亿美元融资,马喆人:有信心最早实现自动驾驶重卡的量产
2020-04-29



